
The Self-Organising Map is a popular unsupervised neural network model which has successfully been used for clustering
various kinds of data.
The SOMVIS Package is an add-on for the Matlab SOMToolbox.
It provides a graphical interface to access a set of visualisations, SOM quality measures, as well as clustering techniques such
as k-means and Ward's linkage that can be applied on the SOM lattice.
Contact: Andreas Rauber.
Features
Visualisation
Besides the U-Matrix and Component Plane visualisations, which are already included in the Matlab SOMToolbox, the
SOMVIS package additionally provides the following visualisations:
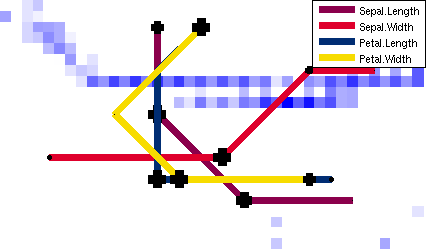
- Metro Map
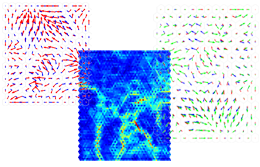
- Gradient Field & Borderline
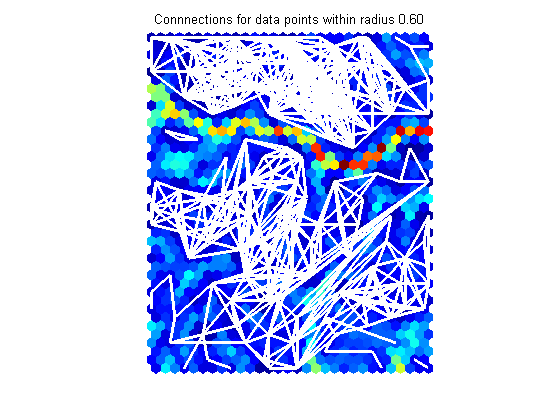
- Neighbourhood Graphs (Graphical Methods)
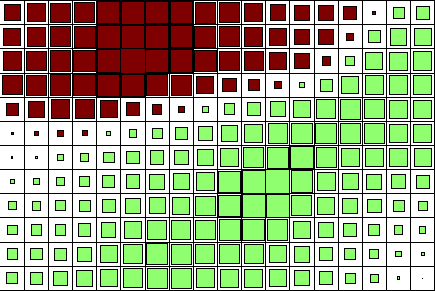
- P-Matrix
- U*-Matrix
- D-Matrix (variation of U-Matrix)
Quality Measures
The SOMVIS package additionally provides the following visualisations:
-
Intrinsic Distance
S. Kaski and K. Lagus. Comparing Self-Organizing Maps. In Proceedings of the International Conference on Artificial Neural Networks (ICANN '96), Bochum, Germany, July 16-19, pages 809-814, Berlin, 1996. Springer. -
Topographic Error
K. Kiviluoto.. Topology preservation in Self-Organizing Maps. In Proceedings of the IEEE International Conference on Artificial Neural Networks (ICANN'96), pages 294-299. Piscataway, New Jersey, USA, June 1996. -
Topographic Product
H. U. Bauer and K. R. Pawelzik. Quantifying the neighborhood preservation of Self-Organizing Feature Maps. In IEEE Transactions on Neural Networks, 3(4):570-579, July 1992. -
Trustworthiness, Neighborhood Preservation
J. Venna and S. Kaski. Neighborhood preservation in nonlinear projection methods. An experimental study. In Proceedings of the Internationla Conference on Artificial Neural Networks (ICANN '01)pages 485-491. Berlin, 2001. Springer
Analytical Tools
We additionally provide tools to further analyse the data and maps, we provide a set of additional methods:-
 Map Clustering
Map Clustering
To identify cluster boundaries, the SOM codebook (weight, model) vectors are clustered. SOMVIS provides the following methods:- Linkage clustering, such as Single Linkage, Complete Linkage, and Ward's Linkage
- K-Means clustering
-
 Data Projections
Data Projections
We provide visualisations of PCA, Sammons mapping and CCA projection methods.
License
The SOMVIS Matlab Visualisation Package for Self-Organising Maps is licensed under the GPL License, Version 3.0.
This means you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation;
either version 3 of the License, or (at your option) any later version.
Installation & How-To
-
Download the package
Note: The SOMVIS Package builds on these other packages:- Matlab SOM Toolbox (http://www.cis.hut.fi/projects/somtoolbox/)
- SDH Toolbox (http://www.oefai.at/~elias/sdh/download.html)
- The "dijkstra.m" file (http://www.mathworks.nl/matlabcentral/fileexchange/loadFile.do?objectId=5550&objectType=file)
- Extract the package to a directory
- Start Matlab, and navigate to the directory
-
Run "setPaths" to set the (relative) paths to the needed libraries
Note: When setting the Matlab path to include all the previously mentioned packages & files manually, the "somvis" directory has to be included above the "somtoolbox" directory, since a function has been overwritten.
-
Train a map
-
Load a data set and train a SOM with it.
Creating a SOM from own data can be done with the SOM Toolbox commandssom_data_struct,som_normalizeandsom_make.
See the Matlab SOMToolbox manual for more details. - Some pre-trained SOMs (along with their data sets) are included in the SOM-VIS package, and can be loaded with the Matlab command:
load datasetName
The following datasets are included in thedata/directory:- Boston.mat
- Cars93.mat
- chickwts.mat
- epil.mat
- frac_big.mat
- frac.mat
- gilgais.mat
- ionosphere_big.mat
- ionosphere.mat
- iris_big.mat
- iris.mat
- mtcars.mat
- nlschools.mat
- phonetic_big.mat
- phonetic.mat
- phonetic_reduced.mat
- pluton.mat
- quakes.mat
- rock.mat
- UScereal.mat
- UScrime.mat
- xclara.mat
-
Load a data set and train a SOM with it.
- Start the GUI with
somvis_gui (map, data)